在計(jì)算機(jī)科技領(lǐng)域,機(jī)器視覺(jué)作為人工智能的重要分支,正廣泛應(yīng)用于工業(yè)檢測(cè)、醫(yī)療影像、自動(dòng)駕駛等領(lǐng)域。HALCON作為業(yè)界領(lǐng)先的機(jī)器視覺(jué)開(kāi)發(fā)庫(kù),以其強(qiáng)大的圖像處理算法和靈活的擴(kuò)展性備受青睞。本文將探討基于C語(yǔ)言與HALCON聯(lián)合開(kāi)發(fā)的軟件框架設(shè)計(jì),旨在為開(kāi)發(fā)者提供一套高效、穩(wěn)定且易于維護(hù)的機(jī)器視覺(jué)解決方案。
一、框架設(shè)計(jì)原則與架構(gòu)概述
一個(gè)優(yōu)秀的機(jī)器視覺(jué)開(kāi)發(fā)框架應(yīng)遵循模塊化、可擴(kuò)展、高性能的原則。本框架采用分層架構(gòu)設(shè)計(jì),自底向上分為硬件抽象層、算法層、業(yè)務(wù)邏輯層和用戶(hù)界面層。硬件抽象層負(fù)責(zé)相機(jī)、光源、運(yùn)動(dòng)控制等設(shè)備的統(tǒng)一接口封裝;算法層集成HALCON核心圖像處理功能;業(yè)務(wù)邏輯層實(shí)現(xiàn)具體檢測(cè)流程;用戶(hù)界面層提供人機(jī)交互界面。C語(yǔ)言作為系統(tǒng)級(jí)編程語(yǔ)言,負(fù)責(zé)框架底層實(shí)現(xiàn)和性能關(guān)鍵模塊的開(kāi)發(fā),而HALCON則通過(guò)其C接口無(wú)縫集成,提供豐富的視覺(jué)算法支持。
二、核心模塊源碼實(shí)現(xiàn)
1. 圖像采集模塊
該模塊封裝了多種工業(yè)相機(jī)(如Basler、Daheng、AVT等)的SDK,提供統(tǒng)一的圖像獲取接口。源碼中通過(guò)動(dòng)態(tài)庫(kù)加載和函數(shù)指針機(jī)制,實(shí)現(xiàn)不同相機(jī)驅(qū)動(dòng)的即插即用。關(guān)鍵函數(shù)如Camera<em>Init()、Camera</em>GrabImage()均以C語(yǔ)言實(shí)現(xiàn),確保實(shí)時(shí)性和穩(wěn)定性。
2. HALCON算法封裝模塊
針對(duì)常用視覺(jué)任務(wù)(如定位、測(cè)量、識(shí)別、檢測(cè)),本框架對(duì)HALCON算子進(jìn)行二次封裝。例如,將find<em>shape</em>model、measure<em>pairs等復(fù)雜算子封裝為Vision</em>Locate()、Vision_Measure()等簡(jiǎn)潔接口,降低使用門(mén)檻。所有封裝函數(shù)均通過(guò)HALCON的C API(如HOperatorSet)調(diào)用,并增加異常處理和日志記錄功能。
3. 流程管理引擎
采用狀態(tài)機(jī)設(shè)計(jì)模式,將視覺(jué)檢測(cè)流程分解為一系列狀態(tài)(如初始化、標(biāo)定、檢測(cè)、結(jié)果輸出)。源碼中定義Process_State結(jié)構(gòu)體,通過(guò)回調(diào)函數(shù)機(jī)制實(shí)現(xiàn)狀態(tài)切換。引擎核心用C語(yǔ)言編寫(xiě),支持多線程并行處理,充分利用多核CPU性能。
4. 數(shù)據(jù)管理模塊
設(shè)計(jì)統(tǒng)一的數(shù)據(jù)結(jié)構(gòu)存儲(chǔ)圖像、特征參數(shù)、檢測(cè)結(jié)果等信息。使用C語(yǔ)言結(jié)構(gòu)體定義ImageData、ModelData等數(shù)據(jù)類(lèi)型,并通過(guò)內(nèi)存池技術(shù)管理HALCON對(duì)象(如HImage、HRegion),避免頻繁創(chuàng)建銷(xiāo)毀導(dǎo)致的內(nèi)存碎片。
三、框架優(yōu)勢(shì)與特色功能
1. 高性能與實(shí)時(shí)性
框架底層采用C語(yǔ)言實(shí)現(xiàn),減少運(yùn)行時(shí)開(kāi)銷(xiāo)。關(guān)鍵算法調(diào)用HALCON的優(yōu)化版本,支持CPU指令集加速(如SSE、AVX)和GPU加速。實(shí)測(cè)表明,在標(biāo)準(zhǔn)工業(yè)場(chǎng)景下,單次檢測(cè)周期可控制在50ms以?xún)?nèi)。
2. 跨平臺(tái)兼容性
源碼遵循ANSI C標(biāo)準(zhǔn),核心模塊可在Windows、Linux系統(tǒng)上編譯運(yùn)行。HALCON本身支持多平臺(tái),進(jìn)一步增強(qiáng)了框架的可移植性。
3. 可擴(kuò)展性設(shè)計(jì)
框架提供插件機(jī)制,允許用戶(hù)通過(guò)動(dòng)態(tài)庫(kù)方式添加自定義算法模塊。算法接口采用標(biāo)準(zhǔn)定義,新模塊只需實(shí)現(xiàn)Algorithm<em>Init()、Algorithm</em>Execute()等函數(shù)即可集成。
4. 易用性與維護(hù)性
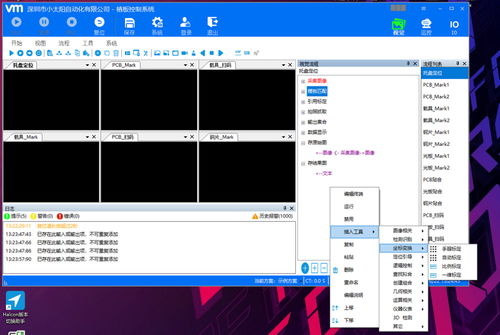
雖然底層用C語(yǔ)言開(kāi)發(fā),但框架提供簡(jiǎn)潔的API接口和詳盡的文檔。內(nèi)置調(diào)試工具和日志系統(tǒng),支持圖像實(shí)時(shí)顯示、參數(shù)在線調(diào)整,極大方便開(kāi)發(fā)和維護(hù)。
四、應(yīng)用案例與開(kāi)發(fā)實(shí)踐
以半導(dǎo)體芯片引腳檢測(cè)為例,展示框架的實(shí)際應(yīng)用:
- 通過(guò)圖像采集模塊獲取芯片高清圖像;
- 調(diào)用封裝后的HALCON定位算法,精確定位芯片位置;
- 使用測(cè)量算法檢測(cè)引腳間距、寬度等尺寸;
- 流程引擎根據(jù)檢測(cè)結(jié)果判斷產(chǎn)品是否合格;
- 數(shù)據(jù)管理模塊將結(jié)果保存至數(shù)據(jù)庫(kù)或輸出至MES系統(tǒng)。
開(kāi)發(fā)實(shí)踐中,建議采用版本控制(如Git)管理源碼,并編寫(xiě)單元測(cè)試驗(yàn)證各模塊功能。對(duì)于復(fù)雜算法,可先用HALCON HDevelop快速原型開(kāi)發(fā),再轉(zhuǎn)換為C代碼集成到框架中。
五、與展望
本文提出的C語(yǔ)言與HALCON聯(lián)合開(kāi)發(fā)框架,充分發(fā)揮了C語(yǔ)言的系統(tǒng)級(jí)控制能力和HALCON的算法優(yōu)勢(shì),為機(jī)器視覺(jué)軟件開(kāi)發(fā)提供了一套完整解決方案。隨著深度學(xué)習(xí)在視覺(jué)領(lǐng)域的普及,框架將進(jìn)一步集成HALCON的深度學(xué)習(xí)工具,支持神經(jīng)網(wǎng)絡(luò)模型的加載和推理。計(jì)劃增加對(duì)3D視覺(jué)和機(jī)器人引導(dǎo)的支持,以適應(yīng)更復(fù)雜的工業(yè)應(yīng)用場(chǎng)景。
通過(guò)開(kāi)源部分核心源碼(如硬件抽象層、流程引擎),我們期待與更多開(kāi)發(fā)者共同完善這一框架,推動(dòng)機(jī)器視覺(jué)技術(shù)的創(chuàng)新與應(yīng)用。